
| 产品名称 | 西门子6RY1707-0AA08西门子6RA70 6RA80直流并联通讯电缆5米 |
|---|---|
| 公司名称 | 上海陌然自动化科技有限公司 |
| 价格 | .00/个 |
| 规格参数 | |
| 公司地址 | 金山区枫泾镇环东一路 |
| 联系电话 | 15000711173 |
品牌: SIEMENS/西门子
西门子(SIEMENS)的PLC产品包括LOGO、S7-200、S7-1200、S7-300、S7-400、S7-1500等。 西门子S7系列PLC体积小、速度快、标准化,具有网络通信能力,功能更强,可靠性高。S7系列PLC产品可分为微型PLC(如S7-200),小规模性能要求的PLC(如S7-300)和中、高性能要求的PLC(如S7-400)等。
参数定义如表1.
表1. 速度轴参数定义
EN | :Bool 子程序使能信号; |
COM_EN | :Bool MBUS通讯触发信号, 上升沿有效,触发一次COM_EN信号,子程序中通讯操作轮询一次; |
Slave_Addr | :Byte V90 驱动MBUS通讯地址(P29004); |
CTW | :WORD V90 驱动MBUS通讯控制字(40100),第0位SON_OFF1必须需要0-->1才能伺服使能;输入:16#41E-16#41F与V90中的40100一致,如果需要单独控制其它位,需要参照控制字每一位的含义,如图10; |
SpeedSet | :Real 速度给定(40101),范围 0.0 % --100.0%额定转速;例:如果额定速度为3000,输入20,则速度为3000*20%=600; |
COM_Buf | :DWORD MBUS读写操作缓冲区,指针变量 格式必须为 &VB,建议每个周间隔50 Bytes,例如Axis_1----&VB6000; Axis_2----&VB6050; Axis_3----&VB6100......; |
Done | :Bool 当前子程序扫描完成信号,可以用于下一个子程序的COM_EN触发信号,但是必须在下一个子程序扫描完成之后进行复位操作; |
Active | :Bool 当前子程序激活,正在处理; |
图10. 控制速度 40100 参数定义
内部位置控制可以实现相对位移和绝位移的控制,可根据实际应用选择使用,如图11。

图11.位置控制程序块
1. 在 V-ASSISTANT 中设置 V90 基本参数,如图12。

图12. V-ASSISTANT 中设置 V90 参数
2. 如果不使用 V-ASSISTANT, 则在 V90 上直接设置参数,如图13。
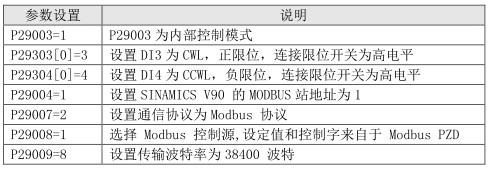
图13. V90 面板直接设置伺服驱动器参数
3. Modbus 初始化,设置的通信速率要与 V90 中的设置一致, 如图14。
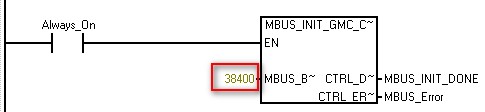
图14. Modbus 初始化
4. 控制相对定位(通过40100参数中的 “POS_TYP" 参数来选择相对位定位), 如图15。
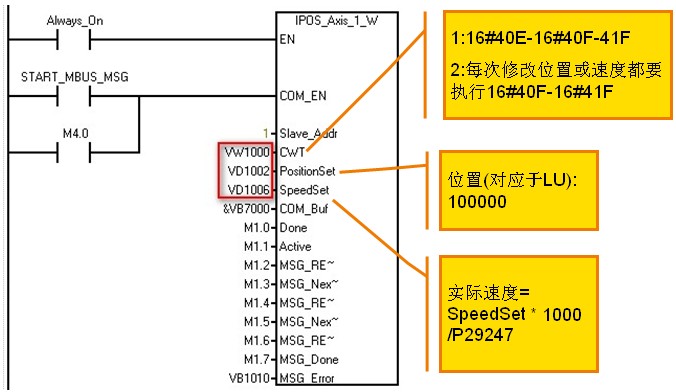
图15. 控制相对定位
参数定义如表2.
表2. 相对定位接口参数定义
:WORD V90 驱动MBUS通讯控制字(40100),位置模式给出 16#40E 到 16#40F,驱动使能,第0位SON_OFF1必须需要0-->1才能伺服使能;然后再给出16#41F,使得STEP_ACC有一个触发上升沿;如果需要单独控制其它位,需要参照V90位置模式IPOS下的控制字每一位的含义,如图16;
:Dint 位置给定,对应于 LU;
:Dint 速度给定,对应于 SpeedSet * 1000 LU/MIN;
:DWORD MBUS读写操作缓冲区,指针变量 格式必须为 &VB,建议每个间隔100 Bytes,例如Axis_1----&VB7000; Axis_2----&VB7100; Axis_3----&VB7200......;
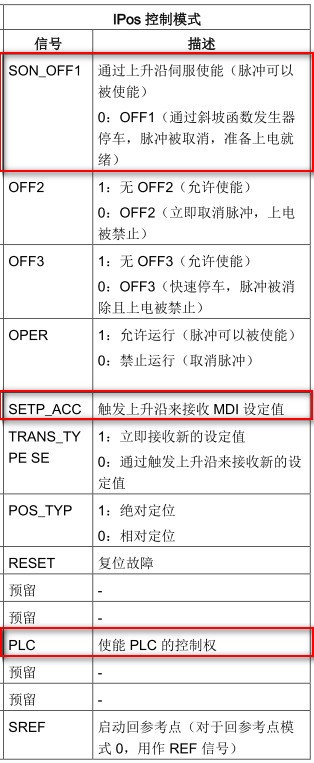
图16. 相对定位 40100 参数定义